参考资料:现代机器人学
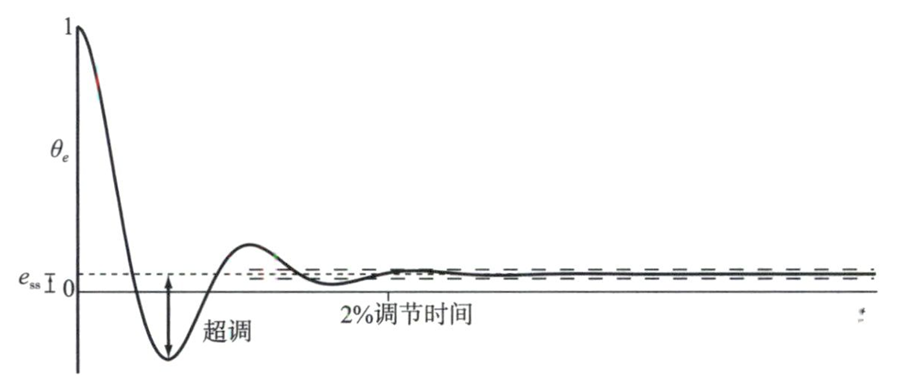
- 态误差很小或者为零
- 超调很小或者零超调
- 2%调节时间很短 \(\left|\theta_{e}(t)-e_{\mathrm{ss}}\right| \leqslant 0.02\left(\theta_{e}(0)-e_{\mathrm{ss}}\right)\)
对于二阶误差动力学,我们要记住的—个非常好的机械类比是:线性的质量-弹簧—阻尼系统!!!
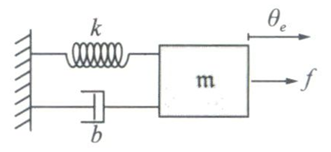
\(m\ddot{\theta}_e + b\dot{\theta}_e + k\theta_e = f\)
\(\tau = K_p \theta_e + K_i \int \theta_e(t) \, dt + K_d \dot{\theta}_e\)
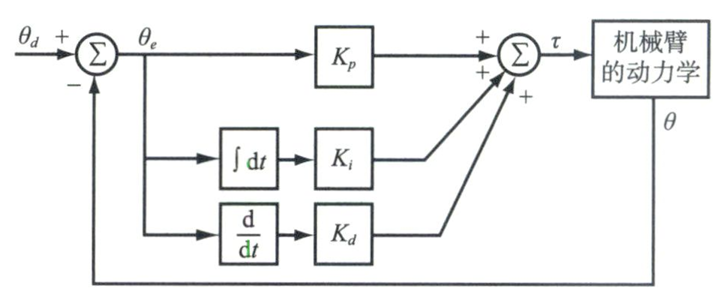
PID 控制器实现
type PIDConfig = {
Kp: float // 比例
Ki: float // 积分
Kd: float // 微分
MinOutput: float
MaxOutput: float
}
type PIDState = { IntegralSum: float; PrevError: float }
let calculatePID (config: PIDConfig) (state: PIDState) target current dt =
let error = target - current
let pOut = config.Kp * error
let newIntegral = state.IntegralSum + (error * dt)
let iOut = config.Ki * newIntegral
let derivative = (error - state.PrevError) / dt
let dOut = config.Kd * derivative
let rawOutput = pOut + iOut + dOut
let output = Math.Clamp(rawOutput, config.MinOutput, config.MaxOutput)
let newState = { IntegralSum = newIntegral; PrevError = error }
output, newState
汽车速度控制模型
// F = ma -> a = F/m
// v = v + (a * time)
type CarState = {
Mass: float // kg
Velocity: float // m/s
DragCoeff: float // 空气阻力系数
}
let calculateCarState (car: CarState) forceApplied dt =
// 空气阻力与速度成正比
let dragForce = car.Velocity * car.DragCoeff
let netForce = forceApplied - dragForce
let acceleration = netForce / car.Mass
{ car with Velocity = car.Velocity + acceleration * dt }
let simulate (pidConfig: PIDConfig) =
let mutable pidState = { IntegralSum = 0.0; PrevError = 0.0 }
let mutable carState = { Velocity = 0.0; Mass = 1000.0; DragCoeff = 50.0 }
let dt = 0.1 // 时间步长(秒)
let targetVelocity = 10.0
let simulationDuration = 150.0 // 秒
let times = ResizeArray<float>()
let velocities = ResizeArray<float>()
let targetVelocities = ResizeArray<float>()
let mutable maxError = 0.0
let mutable p2Time = ValueNone
for i in 0 .. int (simulationDuration / dt) do
let engineForce, newPidState = calculatePID pidConfig pidState targetVelocity carState.Velocity dt
let newCarState = calculateCarState carState engineForce dt
let error = Math.Abs(targetVelocity - carState.Velocity)
times.Add(float i * dt)
velocities.Add(newCarState.Velocity)
targetVelocities.Add(targetVelocity)
pidState <- newPidState
carState <- newCarState
if error > maxError then maxError <- error
if p2Time.IsNone && error <= 0.02 * targetVelocity then
p2Time <- ValueSome(float i * dt)
printfn $"> 最大误差: {maxError:F0} m/s, 2%%调节时间: {p2Time |> ValueOption.defaultValue simulationDuration:F0} 秒"
printfn ""
printChart $"汽车速度模拟PID控制-{pidConfig.Kp}_{pidConfig.Ki}_{pidConfig.Kd}" [
{| Name = "实际速度"; XY = Seq.zip times velocities |}
{| Name = "目标速度"; XY = Seq.zip times targetVelocities |}
]
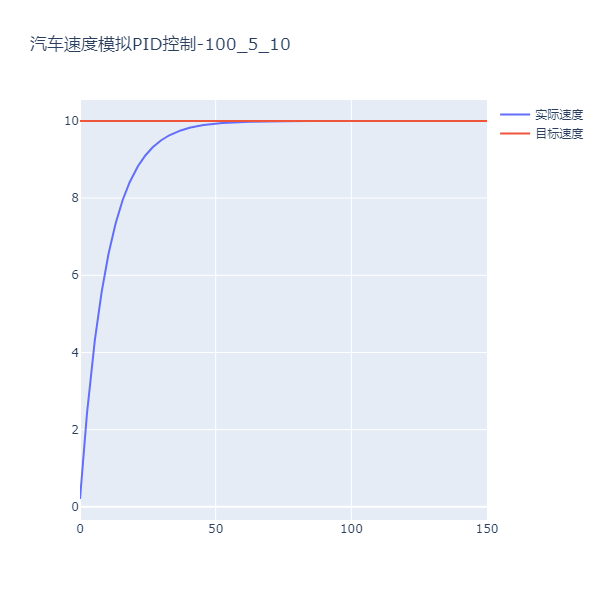
模拟1
simulate {
Kp = 100.0 // 尝试 5.0(慢)与 200.0(激进)
Ki = 5.0 // 尝试 0.0(将定义稳态误差)
Kd = 10.0 // 尝试 0.0 与 50.0(阻尼振荡)
MinOutput = 0.0 // 不能施加负油门
MaxOutput = 5000.0 // 最大发动机力
}
最大误差: 10 m/s, 2%调节时间: 39 秒
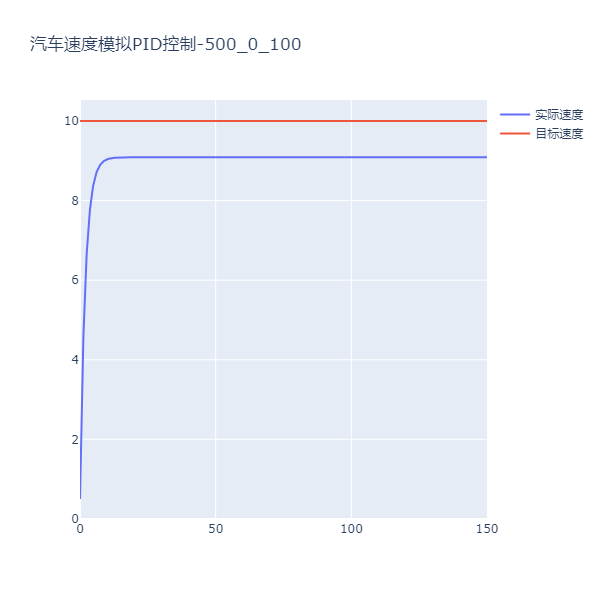
模拟2
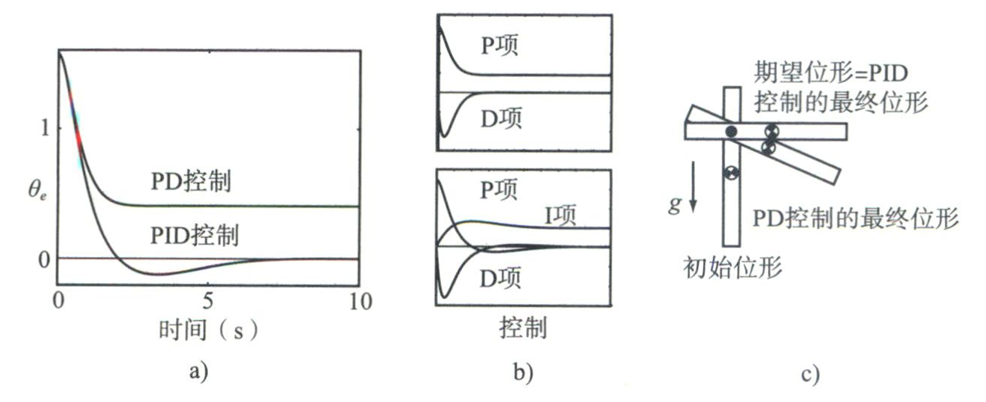
// 当积分项为0,变为 PD 控制器,稳态误差则无法消除。但是可以通过前馈控制来补偿稳态误差。
simulate {
Kp = 500.0
Ki = 0
Kd = 100.0
MinOutput = 0.0
MaxOutput = 5000.0
}
最大误差: 10 m/s, 2%调节时间: 150 秒
PID 控制器调参建议
通常的设计策略是:选取合适的Kp和Kd以获得良好的瞬态响应, 然后选择Ki,它要足够大以有助于减少或消除稳态误差,但又要小到足以使其不会显著影响稳定性。 相对较大的Ki会使瞬态响应变差,从而产生明显的超调,但它消除了稳态误差。
各个参数通俗意义的解释:
- Kp: 是对系统当前误差的即时反应。较高的Kp值会导致系统更快地响应误差,但过高可能引起系统振荡或不稳定。
- Ki: 是对过去误差的累积反应。它有助于消除稳态误差,但过高的Ki值可能导致系统过度反应,从而引起振荡。或不稳定。
- Kd: 是对未来误差(变化率)的反应。它有助于抑制系统的振荡,提供阻尼效果。过高的Kd值可能导致系统响应过慢。